








✓ Adaptation of existing gripping systems
✓ Safe component removal
✓ Precise removal process

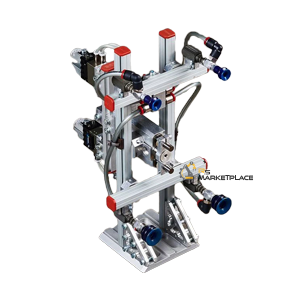
This gripper is designed to remove 4 rubber parts at once.
It uses 4 parallel grippers to grip the rubber parts at the neck, and an additional 4 parallel grippers
to enclose the bellows, preventing over stretching.
a range of grippers with additional functions that can provide enhanced capabilities and improved performance
in industrial automation applications.
These grippers are designed to be highly customizable and can be tailored
to meet the specific requirements of your application.
If you want to improve the performance and efficiency of industrial automation tasks
and can provide significant cost savings over traditional methods.
These grippers are with additional functions are designed to be easy to integrate with different robotic arms,
and can be controlled by different robotic controller platforms.
| Application | Robot Components |
|---|---|
| Type of Gripper | Parallel |
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor | SP005-0113-AA |
| About Vendor | The company develop and produce innovative gripper components, complete gripper and tailor-made, customized solutions. In addition they also engineer and manufacture intelligent feeding systems and sprue cutting stations. |
| Comments |
You must be logged in to post a review.
Software
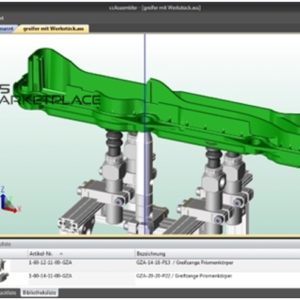
The CAD Grip 2.0 enables interactive configuration of gripper / EOAT systems.
Operating the program is easy and intuitive. Previous knowledge, for example of a CAD system, is not necessary.
CAD Grip is functioning fully independent without usage of any other CAD Software. The user is able, to configure the gripper offline. Software Installation is not necessary. The user receives valuable tips for constructive alternative solutions as he proceeds.
The virtual construction is performed controlled and optimized. The attachment of the matching components takes place automatically. This avoids mistakes in the concept phase already.
When the configuration is completed, the component list can be exported to the Customer Portal and can be ready for instantly placing your order. The project can be saved in the appropriate format for his CAD-Software, as there is Inventor, Autocad, Solidworks, Proengineer or Catia, only to name a few.

Robot Components
Multiple-removal gripper is a revolutionary solution for efficient and precise part removal in industrial automation applications.
This gripper is designed to be lightweight, durable and customizable,
making it ideal for a wide range of applications.
This gripper is designed to remove 32 razor blade covers at once.
It uses tubular gripper profiles and has the advantage of several suction pads that can
be connected to one vacuum source.
Multiple-part removal: The gripper is designed to remove multiple parts at once,
making it ideal for high-volume production lines.
Customizable design: The AGS Multiple-removal gripper can be customized to fit a wide range of objects
and is built to meet the specific requirements of your application.
Lightweight: The gripper is 3D printed using high-strength, lightweight materials,
making it easy to manipulate and reducing the load on the robotic arm.
Durable: The gripper is designed to withstand the rigors of industrial environments
and provide long-lasting performance.

Arc Welding
Robot Components
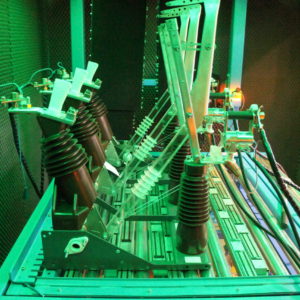
This gripper removes finished overloaded components and also
inserts materials such as bushings, sheets, or screws into molds.

Arc Welding
The Kuka KR 5 is a robotic arm that has gained popularity in industries that require automation. With its precise movements and ability to repeat tasks with high accuracy, the KR 5 has become a sought-after option for companies looking to streamline their manufacturing processes. Its compact design allows it to fit into tight spaces and its modular system makes it customizable for various applications. The KR 5 is also easy to program, making it a user-friendly option for both experienced operators and those new to robotics. Overall, the Kuka KR 5 offers a versatile solution for businesses seeking to increase efficiency and productivity.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.
Testing & Measuring



Reviews
There are no reviews yet.