

Some key features:
• Vacuum: Up to 80%
• Airflow: Up to 12 NI/min
• Vacuum cups: Up to 7 pcs
• Gripping time: 0.35 s
• Releasing time: 0.20 s
• Vacuum pump integrated, electric BLDC
• IP54 classification
• Weight: 0.814 kg
• Compatible to UR, Kuka, Fanuc, Doosan, Yaskawa, Nachi, ABB, Denso, Hanwha etc..
What does the package offer:
• The vacuum gripper
• d40 mm vacuum cups
• d30 mm vacuum cups
• d15 mm vacuum cups
• Fittings
• Push in Fittings
• M6x10 mm screws
• Blind screws
• Torx T30
• Allen 3 mm key
• Adaptor plate
• Extension pipe 50 mm
| Type of product | EOAT/Gripper |
|---|---|
| Type of Operation | Electric |
| Lifting Capacity (kg) | up to 15 kg |
| Integrated Vacuum Generator | Yes |
| Country of origin | Denmark |
| Vendor ID | SP012-0318-OR |
| About Vendor | Our vendor is a an EOAT manufacturer. He is offering a wide range of grippers, accessories, sensors, tool changers. Their aim is to provide their customers a cost effective solution for their robotic automation applications. The EOAT are especially made for cobots. |
| Comments |
You must be logged in to post a review.

Some key features:
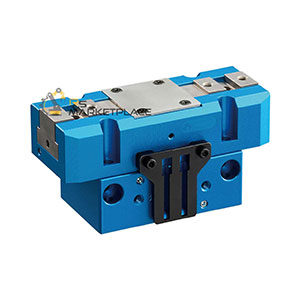
• Can lift up de 20 kg
• Wide stroke gripper, can lift heavy load
• Has Integrated vacuum gripper to handle slip sheets, hence no need for additional gripper.
• No external air supply needed, hence cost effective solution.
How does it work:
• Set up the fingers
• Finger grip and release
1. Measure the width of the part
2. Set the exact width and ty to grip
3. Lower the width by 10 mm and grip again
• Operate the vacuum
1. Set the maximum vacuum
2. Measure the vacuum level
3. Set the vacuum accordingly to the previously measured level

Some key features:
• Vacuum: Up to 80%
• Airflow: Up to 12 NI/min
• Arm holding torque: 6 Nm
• Vacuum cups: up to 16 pcs
• Gripping time: 0.35 s
• Releasing time: 0.20 s
• Foot-inch-foot: 1.40 s
• Weight: 1.70 kg
• Compatible to UR, Kuka, Fanuc, Doosan, Yaskawa, Nachi, ABB, Denso, Hanwha etc..
What does the package offer:
• The Vacuum gripper
• 16 fittings for vacuum cups
• 10 x d30 mm vacuum cups
• 4 xd40 mm vacuum cups
• 4x 15 mm vacuum cups
• 16 X blind screws
• Torx 30 key

Some key features:
• Payload force fit:
• Normal grip: 10 kg
• Flexible grip: 8 kg
• Payload form fit: 15 kg
• Grip diameter external: 4 mm(min) – 152 mm (max)
• Grip diameter internal: 35 mm (min)- 176 mm (max)
Gripping force:
• normal grip: 240 [N]
• Flexible grip: 140 [N]
• Gripping force: 100%
• Gripping speed: 125 mm/s
• Gripping time: 500 ms
• Dimensions: 156x158x180 mm
• Weight: 1.15 kg
• TCP: X=0; Y=0; Z=105
• Center of gravity: cX=0;cY=0;cZ=83 mm
• Fingers can be adjusted in 3 different positions
• Possibility to create custom fingers
• Accurate centric positioning drives higher quality, consistency, and output with minimal programming
• Strong, stable grip and 3 contact points makes gripper fast and easy to redeploy for multiple processes
• Accomplish more with customizable fingertips to flexibly grip a wide range of part sizes and shapes
What does the package offer:
• 1 piece of gripper base unit
• 3 pieces standard fingers
• 3 pieces 10 mm. steel fingertips
• 3 pieces 13.5 mm. ruber fingertips
• Torx key
Additional fingertips:
3 pieces Ø 13 mm. steel fingertips
3 pieces Ø 16.5 mm. rubber fingertips

What does the packaging contain:
• Sanding tool
• Power supply
• Tool power cable
• Polishing pad
• Grit 2×80, 120, 220, 400
• Pad wrench 24 mm
Some key features:
Force torque control: 0-200N
• RPM: 1000-10000RPM
• Dimensions: 87x123x214 mm
• Weight: 1.4 kg
• Pad size type: standard
• Vacuum hose attachment: standard
• Compatible with sensors
• Compatible with Ethernet IP or Weblogic, UR cap version
How does it work:
Make a sanding application
1. Mount the tool on the robot
2. Use a wooden material
3. Create a new surface finishing
4. Use the trajectory options to create a custom shape
5. Execute the surface finishing
Make a polishing application:
1. Mount the tool on the robot
2. Use a workpiece that should be polished
3. Create a new surface finishing
4. Use the trajectory options
5. Execute the surface finishing

Palletizing
Some key features:
• Maximum speed of the robot lifter: 100 mm/s
• Maximum reach of the robot lifter: 900 mm
• Payload of the robot lifter: 100 kg
• Ensures precise positioning of boxes, even at high speeds
• Easy friendly to operate and initialize
• Manual available in many languages
Description of initialization:
• Power cycle
• Move the lifter to 164 mm to 55 mm/s
• Measure the distance from the robot lifter’s flange to the base of it.
• Initialize the lifter
• Move it again to 164 mm with 55 mm/s and measure the distance.
• Compare the results.

Some key features:
• 10 kg payload
• Gripping time 300ms
• Small foot print Ø 71 mm
• No costs of external air supply required
• Part detection ensures reliable handling of a wide range of part sizes and weights
• Fast, compact and customizable gripper to fit all your application needs
• Ensure safe and reliable operation by maintaining grip even after power loss or emergency stop
What does the package offer:
• Gripper
• Tx10 key
• M3x8 screw
• Fingertips for cylindrical objects
• Protective pads

Close Force: 6400 N
Open Force: 6900 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 32mm(dia.), 16mm(per finger)
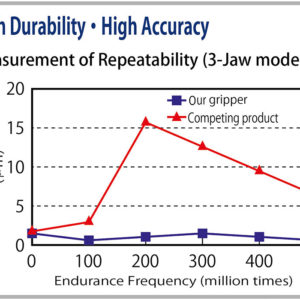
Repeatability: ±0.01 mm
Mass : 4.53 kg
Air Consumption per reciprocating : 505.8 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60℃

Close Force: 1010 N
Open Force: 1120 N
Air pressure set: at 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 16mm(dia.), 8mm(per finger)
Repeatability: ±0.01 mm
Mass : 0.70 kg
Air Consumption per reciprocating : 50.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃

Close Force: 1810 N
Open Force: 1930 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 20mm(dia.), 10mm(per finger)
Repeatability: ±0.01 mm
Mass: 1.21 kg
Air Consumption per reciprocating : 112 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃
Close Force: 2700 N
Open Force: 2870 N
Air pressure set at: 0.6 MPa.
Measurement Distance L: 20 mm
Jaw Stroke: 40mm(dia.), 20mm(per finger)
Repeatability: ±0.01 mm
Mass: 5.14 kg
Air Consumption per reciprocating :
272.2 cm3
Air pressure : 0.2 ~ 0.8 MPa
Operating Temperature: 5 ~ 60 ℃


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <300 g
Best for products of rectangular or cubic shape.



Reviews
There are no reviews yet.