




Weight: 15.5 kg
Lifetime: 30000h
Ambient humidity: 25%-85%
Ambient temperature: 0-45°
Repeatability: ± 0.02 mm
Communication: CAN bus
Motor type: DC 48V
Axis movement:
J1 Axis Base: ±175°
J2 Axis Shoulder: ±175°
J3 Axis Elbow: ±175°
J4 Axis Wrist: ±175°
J5 Axis Wrist: ±175°
J6 Axis Wrist: ±175°
Control Box:
Communication: Ethernet, Modbus -RTU /TCP
Interface: SDK(Support C/C++/Lua/Python)Support ROS API
Teach pendant:
IP classification: IP54
| Weight | 3 kg |
|---|---|
| Dimensions | 625 mm |
| # of Axes | 6-axes |
| Type of system | Collaborative |
| Payload (kg) | 3 |
| Reach (mm) | 625 |
| State of product | New |
| Country of origin | China |
| Country of shipment | China |
| Vendor | RB011-0164-AR |
| Application | Cobots, Robot, Screw driving applications, Spraying, Assembly, Material Handling, Pick & Place, Palletizing, Polishing |
| Industry | Aluminium, Plastics, Steel |
| Mounting | Floor-mounted, Ceiling-mounted, Wall-mounted |
| About Vendor | |
| Comments | Compliant with ISO 10218-1:2011 for interoperability Comply with EU CE certification, North American certification, Korea KCs certification, China CR certification |
You must be logged in to post a review.

Assembly
Weight: 37 kg
Lifetime: 30000h
Ambiant humidity: 25%-85%
Ambiant temperature: 0-45°
Repeatability: ± 0.01 mm
Communication: CAN bus
Motor type: DC 48V
Axis movement:
J1 Axis Base: ±175°
J2 Axis Shoulder: ±175°
J3 Axis Elbow: ±175°
J4 Axis Wrist: ±175°
J5 Axis Wrist: ±175°
J6 Axis Wrist: ±175°
Control Box:
Communication: Ethernet, Modbus -RTU /TCP
Interface: SDK(Support C/C++/ Lua/Python) Support ROS API
Teach pendant:
IP classification: IP54

Grinding
Key features:
Weight: 53 Kg
Repeatability: ±0.02mm
Working range:
Axis 1 rotation: -170°/+170°
Axis 2 arm: -100°/+135°
Axis 3 arm: -120°/+156°
Axis 4 wrist: -200°/+200°
Axis 5 bend: -135°/+135°
Axis 6 turn: -360°/+360°

Assembly
Weight: 24 kg
Lifetime: 30000h
Ambient humidity: 25%-85%
Ambient temperature: 0-45°
Repeatability: ± 0.02 mm
Communication: CAN bus
Motor type: DC 48V
Axis movement:
J1 Axis Base: ±175°
J2 Axis Shoulder: ±175°
J3 Axis Elbow: ±175°
J4 Axis Wrist: ±175°
J5 Axis Wrist: ±175°
J6 Axis Wrist: ±175°
Control Box:
Communication: Ethernet, Modbus -RTU /TCP
Interface: SDK(Support C/C++/ Lua/Python) Support ROS API
Teach pendant:
IP classification: IP54


Loading
Key features:
Weight: 260 Kg
Repeatability: ±0.03mm
Working range:
Axis 1 rotation: -170°/+170°
Axis 2 arm: -95°/+155°
Axis 3 arm: -95°/+170°
Axis 4 wrist: -185°/+185°
Axis 5 bend: -135°/+135°
Axis 6 turn: -400°/+400°


Loading
Key features:
Weight: 280 Kg
Repeatability: ±0.03mm
Working range:
Axis 1 rotation: -170°/+170°
Axis 2 arm:-95°/+155°
Axis 3 arm: -95°/+170°
Axis 4 wrist: -185°/+185°
Axis 5 bend: -135°/+135°
Axis 6 turn: -400°/+400°

Material Handling
Key features:
Weight: 21.2 Kg
Repeatability:
Axis 1 & Axis 2: ±0.015 mm
Axis 3: ±0.01mm
Axis 4: ±0.005°
Working range:
Axis 1 rotation: -134°/+134°
Axis 2 arm: -150°/+150°
Axis 3 arm: 200mm
Axis 4 wrist: -360°/+360°


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.

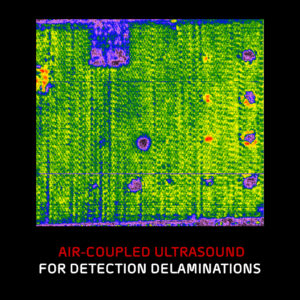
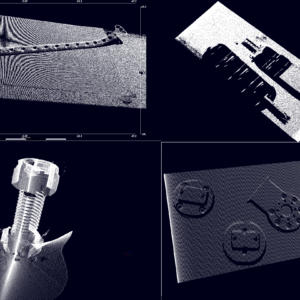
Combination of x-ray and UT imaging
Unlike conventional devices, the integration of imaging technologies on six-axis robotic arms gives a high degree of flexibility in monitoring the complex curvature on both sides of the inspected object, allowing non-destructive testing (NDT) to be expanded and improved. Robots allow to scan a sample with the use of X-ray from a different perspective to locate defects more easily, quickly, and better.
One of the major advantages is that the system can be moved to the object to be inspected. This is in sharp contrast to common industrial CT systems where the sample has to fit inside. Our machine can get to the sample.
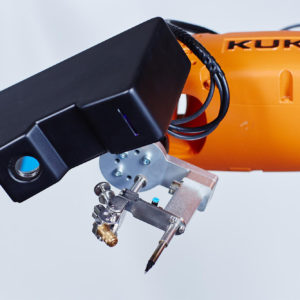
3D Vision System positioning robot in space
This 3D Vision System is an eye for the robot. The advanced optical system, positioning and scanning algorithms allow for the offset of production processes and visual inspection of items. The robot arm with vision system scans the workspace and finds the items that are needed according to the models, and can also perform other activities on it – packing, pick & place, soldering, assembly.

Robot Components
KUKA linear units are translational motion units Linear units can be used to extend a robot?s work envelope or alternatively to move workpieces or tools within the work envelopes of a number of robots. This allows applications such as the tending of more than one machine or fixture, order picking from rows of pallets, or work on very large components. Control of the linear unit is integrated as a mathematically coupled axis in the robot controller, dispensing with the need for an additional controller.



Reviews
There are no reviews yet.