






• Our pneumatically driven fingers are made of FDA-approved silicon rubber.
• We guarantee a lifetime of more than 10 million cycles at 1 bar pressure.
• Hygienic designed.
• Easy to use and essentially made for cobots.
Typical gripping tasks:
Croissants, breadsticks, aluminum foil roll, packaging material, chicken legs.
![]()
Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 40 mm – 120 mm
Weight: <1200 g
Best for products of Rectangular or cylindrical shape.
| Type of service | EOAT/Gripper |
|---|---|
| Type of Operation | Pneumatic |
| Type of Gripper | Parallel |
| Strength (N) | <100 N |
| Number of Jaws | 6-Jaw, Other |
| Type of product | EOAT/Gripper |
| Country of origin | Germany |
| Country of shipment | Germany |
| Vendor ID | SP013-0139-SG |
| About Vendor | |
| Comments | The pneumatic grippers are soft and light, capable to manipulate all kinds of food, hygienic designed easy to use and essentially made for cobots. Grippers are guaranteed 10 million cycle lifetime. The company can also provide a tailor-made solution for their customers. |
You must be logged in to post a review.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <600 g
Best for products of rectangular or cubic shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <1200 g
Best for products of spherical or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: > 10 Mio. Cycles: @1.0 bar, 0.5 Hz
The Kit includes all elements to assemble 4 different soft grippers.
– 6x Fingers
– 2 Fingers Parallel Base
– 3 Fingers Centric Base
– 4 Fingers Parallel Base
– 6 Fingers Centric Base
– Robot Flange ISO 9409-A50-R
– Robot Flange ISO 9409-A31,5-R
– Spacer
Suction Cup
– Screws, Tools, Pneumatic Accessories


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <450 g
Best for products of circular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: > 10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 40 mm – 120 mm
Weight: < 1200 g
Best for products of Rectangular or cylindrical shape.


Other types of robots: Delta / Scara.
Finger Material: Silicone
Operating Pressure: -0.5 to 1.0 bar
Grip Force per Finger: 5 N
Durability: >10 Mio. Cycles: @1.0 bar, 0.5 Hz
Feed size: 5 mm – 120 mm
Weight: <300 g
Best for products of rectangular or cubic shape.


Material Handling
The kit was developed out of years of experience in gripper construction. The concept is to assemble the components in perpendicular orientation whenever possible and make only the active element, such as the vacuum cups, the sprue gripper or gripper finger freely adjustable. All channel nut components are compatible.

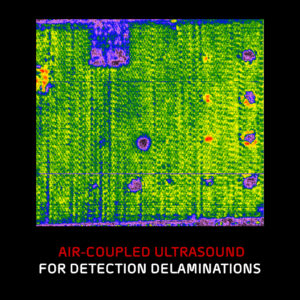
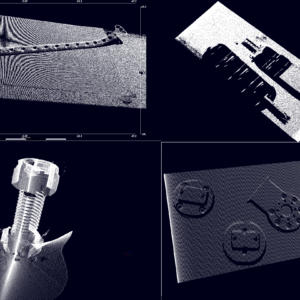
Combination of x-ray and UT imaging
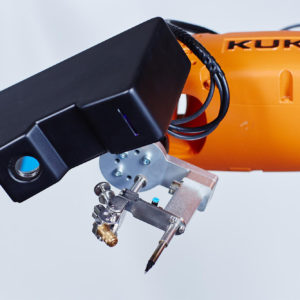
Unlike conventional devices, the integration of imaging technologies on six-axis robotic arms gives a high degree of flexibility in monitoring the complex curvature on both sides of the inspected object, allowing non-destructive testing (NDT) to be expanded and improved. Robots allow to scan a sample with the use of X-ray from a different perspective to locate defects more easily, quickly, and better.
One of the major advantages is that the system can be moved to the object to be inspected. This is in sharp contrast to common industrial CT systems where the sample has to fit inside. Our machine can get to the sample.
3D Vision System positioning robot in space
This 3D Vision System is an eye for the robot. The advanced optical system, positioning and scanning algorithms allow for the offset of production processes and visual inspection of items. The robot arm with vision system scans the workspace and finds the items that are needed according to the models, and can also perform other activities on it – packing, pick & place, soldering, assembly.



Reviews
There are no reviews yet.